Proje Başlığı: Pnömatik Yapay Kas Tabanlı Üst Ekstremite Manipülatörü ve Esnek Robotik Kavrayıcı Geliştirilmesi
Proje Türü: TÜBİTAK-1001 Bilimsel ve Teknolojik Araştırma Projesi
Proje Yürütücüsü: Doç. Dr. Akın Oğuz KAPTI
Araştırmacılar: Doç. Dr. Sedat İRİÇ, Prof. Dr. Adnan DERDİYOK, Dr. Öğr. Üyesi Mustafa Çağrı KUTLU
Bursiyerler: Muhammet Ömer İBİŞ, Derya İRİÇ, Filiz ATAK
Proje Tarihleri: 01.10.2022 – 01.10.2025 (36 ay)
Proje Konu ve Kapsamı:
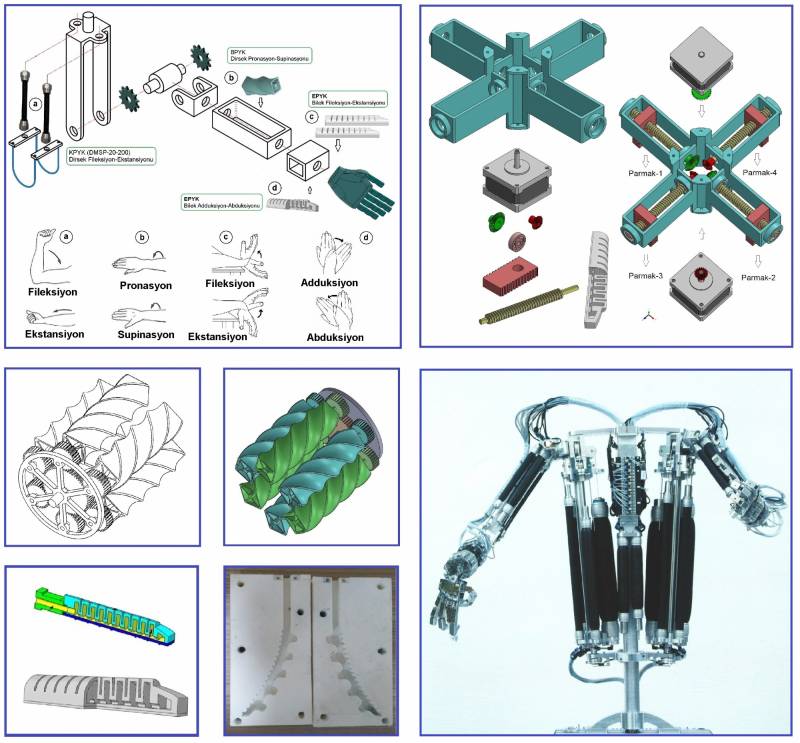
Proje kapsamında üç farklı tür pnömatik yapay kas geliştirilecek ve eklem hareketleri bu yapay kaslarla sağlanan bir üst ekstremite manipülatörünün tasarım, analiz ve prototip üretim çalışmaları yürütülecektir. Proje konusu TÜBİTAK tarafından belirlenen öncelikli alanlar arasında yer alan “Yumuşak Robotlar”, “Robotik Sistem Bileşenleri” ve “Yeni Nesil Protezler” alanlarıyla ilişkilidir. Makine, elektronik, mekatronik, kontrol, biyomedikal ve malzeme mühendislikleri ve robotik, biyomekanik, fizik tedavi rehabilitasyon alanlarını kapsayan disiplinler arası bir konudur.
Proje yedi aşamadan oluşmaktadır. Birinci aşamada, tasarımı ve üretimi proje kapsamında gerçekleştirilecek olan bir deney düzeneğinde yapılan çalışmalarla, PYK kuvvet karakteristiği modeli geliştirilecektir. İkinci aşamada bir PYK çiftinin agonist-antagonist yapay kas çifti olarak eklem kontrolünde kullanılması için yöntem geliştirilecektir. Üçüncü aşamada, bilek eklemi fileksiyon-ekstansiyon ve abduksiyon-adduksiyon hareketleri ve robotik kavrayıcılar için, eğilen tarzda PYK tasarımları geliştirilerek tasarım kriterleri optimize edilecektir. Dördüncü aşamada, PYK tabanlı esnek robotik kavrayıcının tasarım, üretim ve test çalışmaları yürütülecektir. Beşinci aşamada, dirsek eklemi pronasyon-supinasyon hareketi için burulan tarzda PYK tasarımları geliştirilecektir. Tasarım parametrelerinin varyasyonları için çok sayıda eğilen ve burulan PYK üretilerek bunların testleri yapılacaktır. Uygulanacak yapay kas geliştirme yaklaşımının ana aşamaları; kas geometrisinin belirlenmesi, sert kalıp tasarımı ve 3B yazıcıda üretimi, silikon elastomerin kalıba döküm/vakumlama/kürleme işlemlerinin yapılması, test çalışmalarının yapılması, parametreler arasındaki ilişkiyi tanımlayan modelin kurulması, optimum konfigürasyonun belirlenmesi, kontrol yaklaşımı geliştirilmesi şeklindedir. Altıncı aşamada, önceki aşamalarda elde edilen ara çıktılar kullanılarak üst ekstremite manipülatörünün tasarım, üretim ve test çalışmaları yürütülecektir. Yedinci aşamada ise tanıtım ve yayılım faaliyetleri yürütülecektir.
Projede geliştirilecek üst ekstremite manipülatörü insansı robotlar, yumuşak robotlar, biyomimetik robotlar, rehabilitasyon robotları, aktif ortez ve protezler, giyilebilir dış iskelet sistemleri, tekrarlı hareket yapan test sistemleri ve diğer endüstriyel uygulamaları kapsayan geniş bir potansiyel kullanım alanı yelpazesine sahiptir. Esnek robotik kavrayıcının potansiyel kullanım alanları ise farklı boyut ve geometrilerdeki, simetrik ya da asimetrik, kırılgan ya da deforme olabilen çok çeşitli nesnelerin güvenli bir şekilde kavranmasını gerektiren her türlü otomasyon uygulamalarıdır. Bu çerçevede, projenin geniş bir yaygın etki potansiyeli bulunmaktadır.